

Робототехника является, наряду с биотехнологиями, нанотехнологиями и технологиями виртуальной реальности локомотивной отраслью, которая определяет шестой технологический уклад мировой экономики.
Лаборатория сформировалась в конце семидесятых – в начале восьмидесятых годов двадцатого столетия. При этом программное управление пространственными механизмами – станками и манипуляторами, опирающееся на технологии формообразования, явилось стержневым направлением учебной и научной деятельности учёных лаборатории.
За время существования лаборатории сменилось несколько поколений устройств программного управления. От устройств, построенных на аналоговых элементах, микросхемах малой и средней степени интеграции, до распределённых на основе локальных вычислительных сетей микропроцессорных устройств – вот путь, пройденный за последние сорок лет.
Занятия в лаборатории проводятся в русле следующих, читаемых студентам, дисциплин:
- «Робототехнические системы»;
- «Системы числового программного управления»;
- «Прикладные задачи в системах числового программного управления»;
- «Устройство систем числового программного управления».
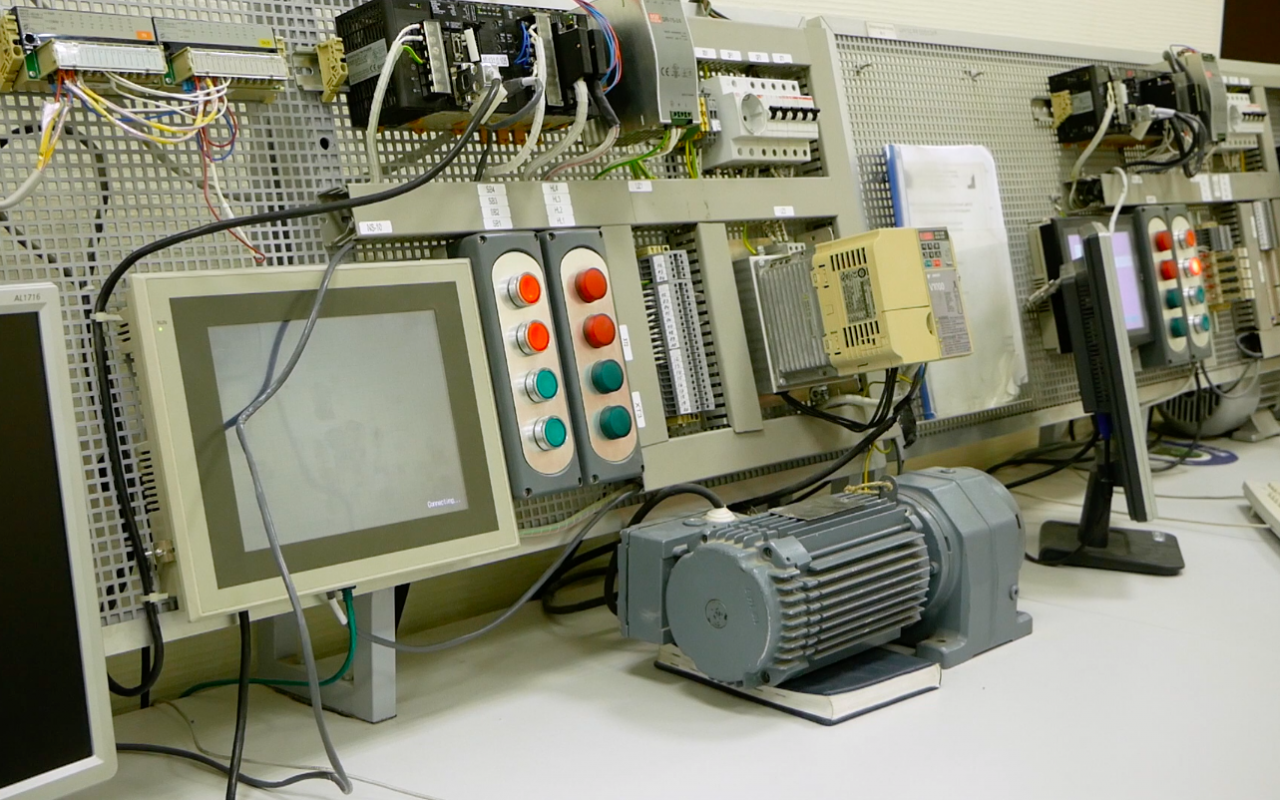
Оснащение лаборатории:
- Лабораторная установка для программирования РТК дуговой сварки
- Лабораторная установка для изучения режимов работы УЧПУ фрезерного станка
Контакты
| Кафедра РАПС | |
| Вейнмейстер Виктор Генрихович | |
| Заведующий лабораториями | |
| пн.-пт. с 10:00 до 17:00 | |
| 197022, Россия, Санкт-Петербург, ул. Профессора Попова, дом 5 литера Щ, каб. D102 | |
| vgveinmeister@etu.ru |
В лаборатории проводятся исследования программного и адаптивного управления пространственными механизмами с учётом выполнения ими операций формообразования.